#14_Cảm biến góc MPU6050
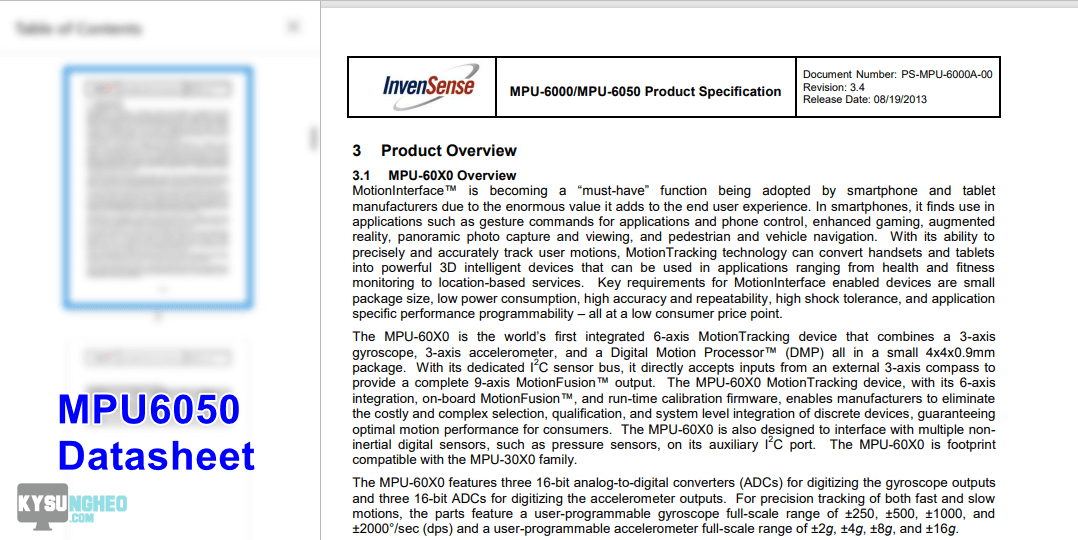
MPU6050, là 1 cảm biến sử dụng để đo vận tốc góc (gyroscope) và gia tốc (accelerometer). Trong bài viết “STM32 và ngoại vi” này ta sẽ cùng tìm hiểu cách sử dụng nó.
———————————
Cùng xem bài viết bên dưới.
MPU6050 – STM32 và ngoại vi
Cảm biến góc GY-521 MPU6050 là một cảm biến sáu trục, có chứa một gia tốc 3 trục con quay hồi chuyển 3 trục. Hoạt động với 3.3V và giao tiếp I2C với tốc độ tối đa 400kHz.

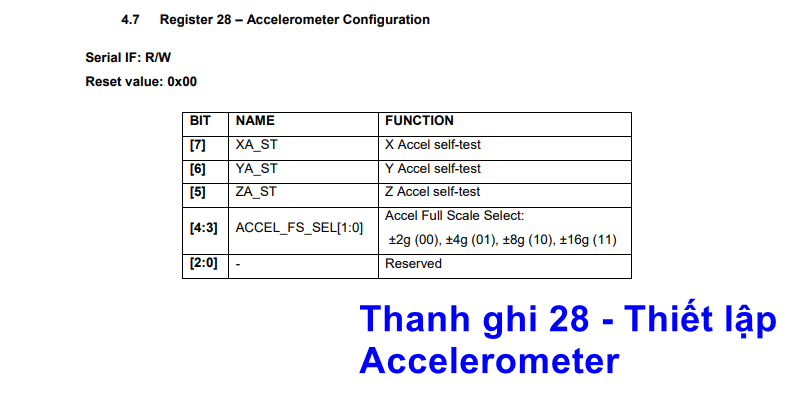
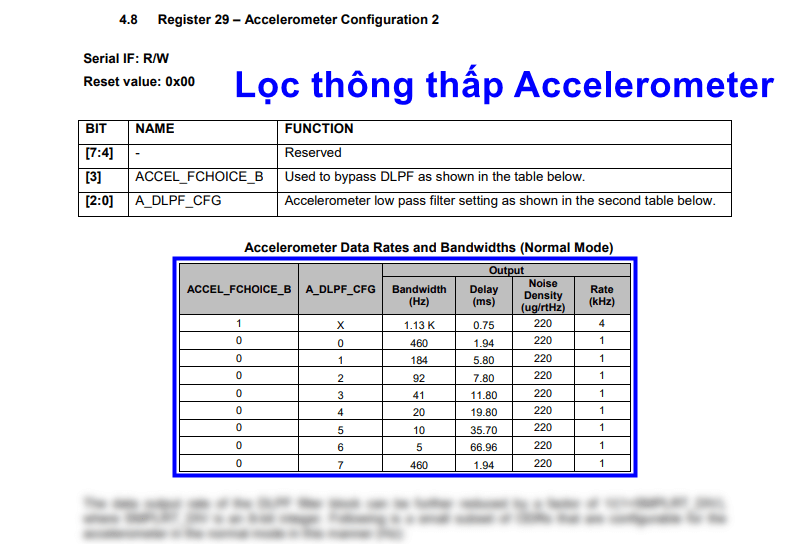
Trước tiên là 1 số thông tin về module MPU6050 này. Download pdf ở bên dưới.
Ta sử dụng giao tiếp I2C để giao tiếp với vi điều khiển, nếu chưa rõ về giao tiếp này, tìm hiểu kỹ hơn tại “#1_Chuẩn giao tiếp I2C”
Thực hành trên STM32cubeIDE
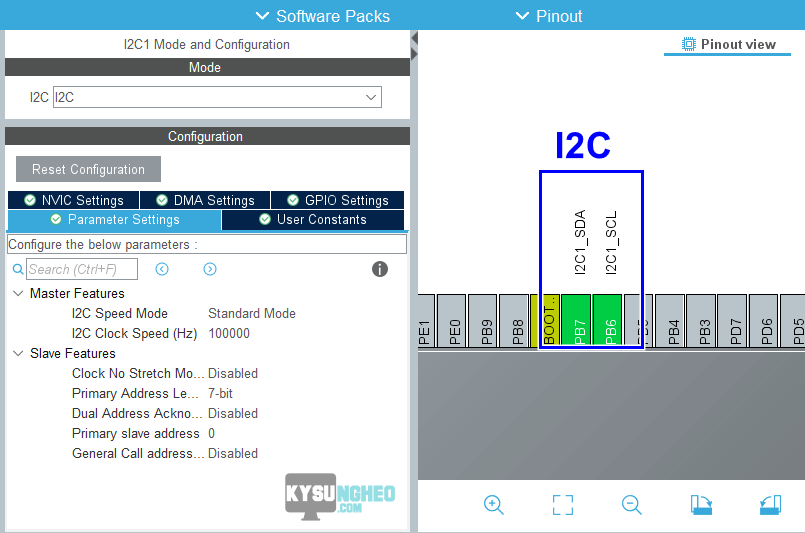
Cấu hình chân
Phần cứng như bên dưới, sử dụng I2C nên kết nối rất đơn giản.
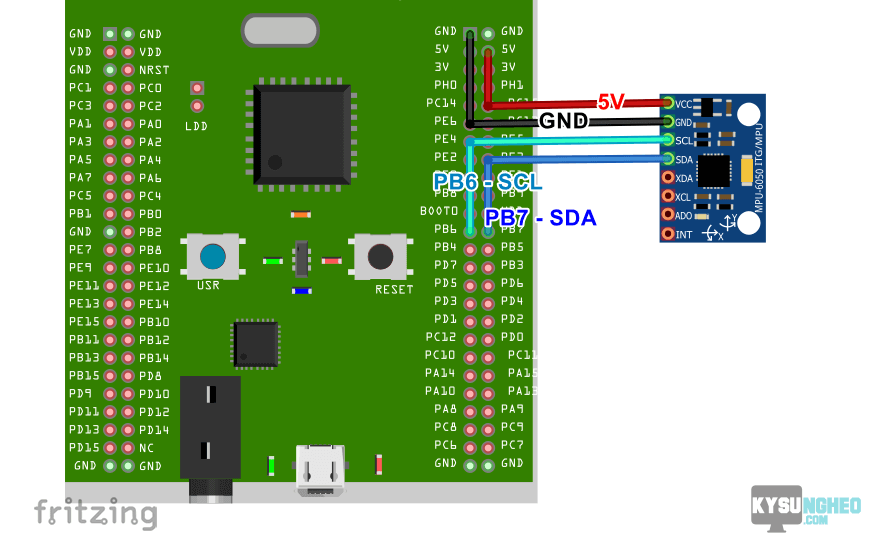
1 số lưu ý:
- Nguồn cấp sử dụng trực tiếp nguồn 5V từ vi điều khiển.
- (PB6 – SCL) và (PB7 – SDA)
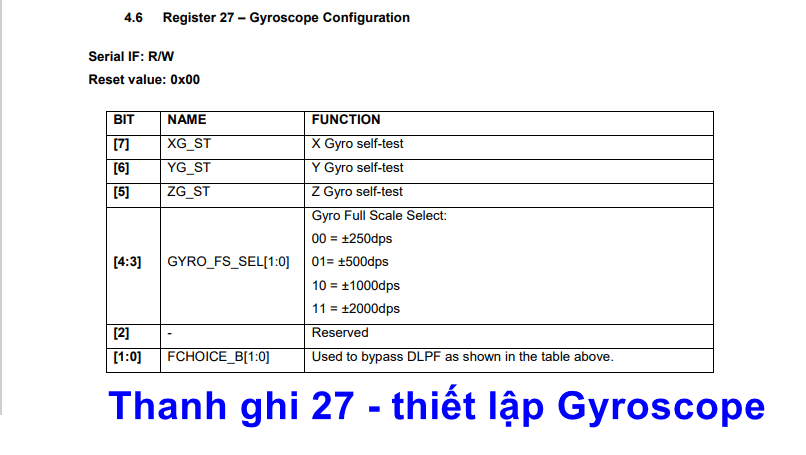
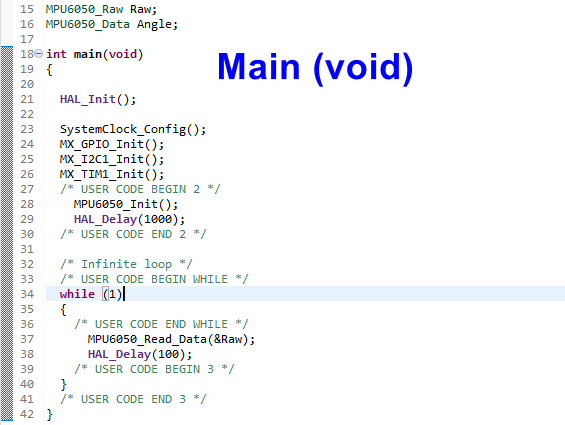
Lập trình MPU6050
Trong hàm main (void) nhận dữ liệu thô từ cảm biến (Vận tốc góc và gia tốc).
Và đây là kết quả debug:
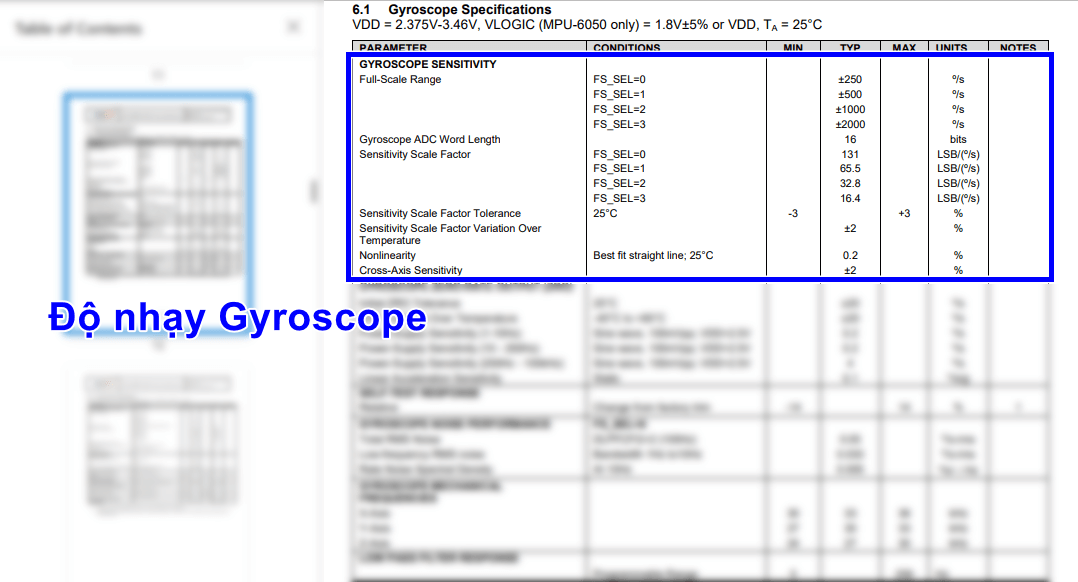
Dữ liệu từ con quay hồi chuyển (Gyroscope):
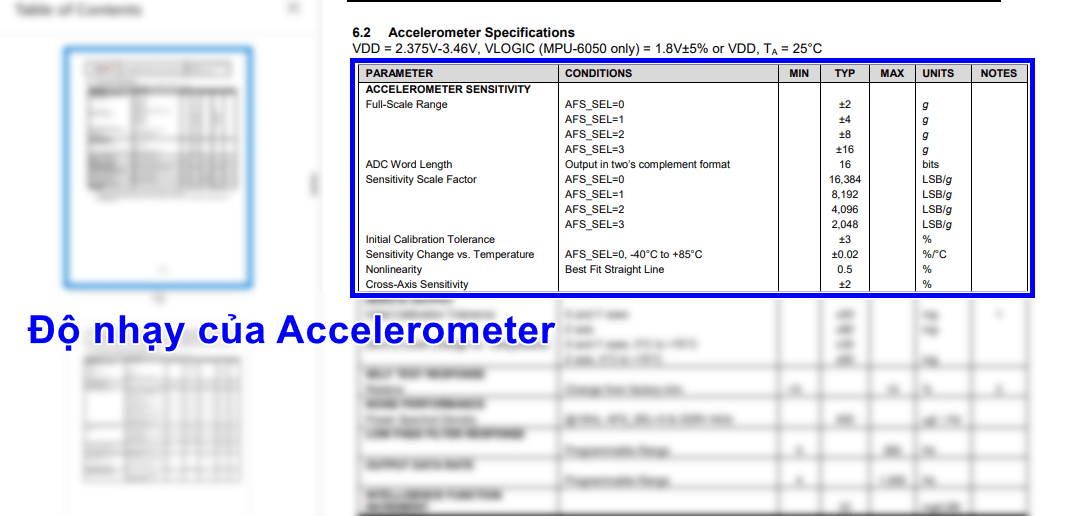
Dữ liệu từ gia tốc kế (Accelerometer):
Phần cứng và code
Phần cứng sử dụng STM32F411, module cảm biến góc. Phần mềm sử dụng là stm32cubeIDE. File code ví dụ các bạn tải về bên dưới, phần cứng tại Shoppe.
Ta vừa tìm hiểu về MPU6050 trong chuyên mục STM32 và ngoại vi. Mong rằng chuyên mục này sẽ giúp nhiều bạn tiếp cận hơn với ngoại vi dòng vi điều khiển STM32.
Trong bài viết tiếp theo ta sẽ tìm hiểu về ngoại vi bluetooth HC-05 và HC-06, cách giao tiếp của 2 module này giống nhau…
Các bài viết khác cùng chuyên mục trong “STM32 và ngoại vi“.
Các chuyên mục khác:
Bạn có thắc mắc gì trong bài viết không?
Đánh giá và để lại bình luận bên dưới nhá.